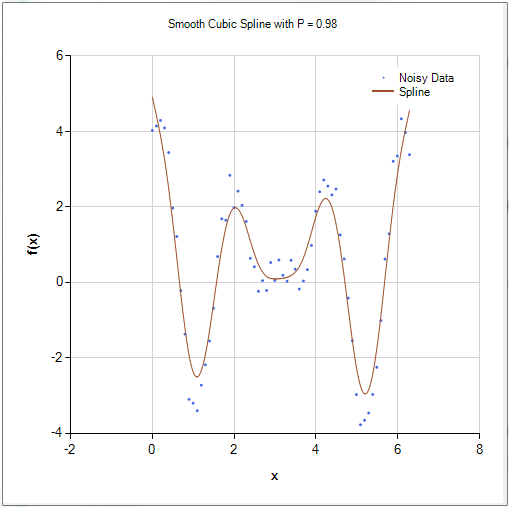
Cubic smoothing splines embody a curve fitting technique which blends the ideas of cubic splines and curvature minimization to create an effective data modeling tool for noisy data. Traditional interpolating cubic splines represent the tabulated data as a piece-wise continuous curve which passes through each value in the data table. The curve spanning each data interval is represented by a cubic p...
Read More
Read More